

usb7
精巧强大的USB外设
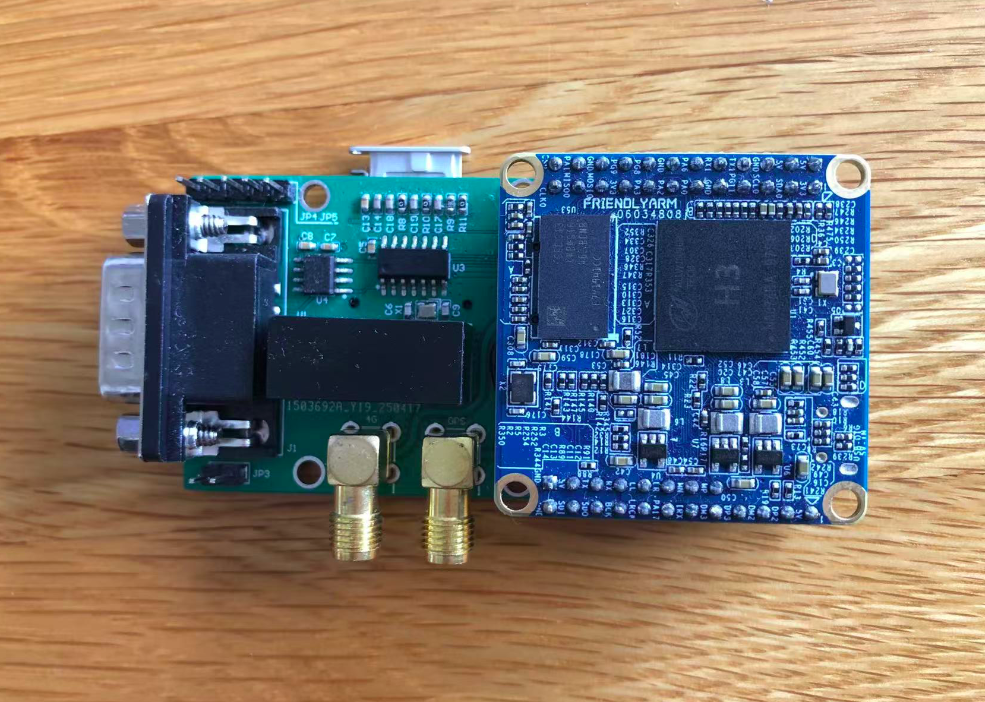
CAN/OBD开发板
这是一款带远程访问功能的CAN/OBD开发板:
- 主要特点是:Debian 12运行环境,使用C++、Python、或Rust做软件开发。
- 可以通过汽车OBD口供电。
- 典型应用是:C++和Python混合编程,编写C++代码从汽车OBD口读取CAN数据和DBC解码,编写Python代码将CAN数据上传到云端。关于CAN数据DBC解码的部分,C++的运行效率是Python的5倍以上;关于和云端接口的部分,使用Python可以大大地提高编写代码的效率和可靠性。带有DBC编码和解码的开发demo:https://gitee.com/usb7/can-demo-python
- 可以远程访问,这让远程调试变得容易,尤其是当汽车在路上跑的时候。
- 我们有经过市场验证的 C++ 代码,用于从 OBD/CAN 接口读取 CAN 数据,并使用 DBC 文件进行解码/编码。
特点
- 全志H3芯片 - ARM 4核Cortex-A7 1.0GHz,512M DDR3,8GB eMMC
- CAN/OBD 接口
- 支持CAN FD
- 可以通过车辆的 OBD 接口供电
- 2.4GHz WiFi,使用 ap6212/brcmfmac43430
- (仅在中国测试,可能在欧盟有效)4G CAT1 模块,使用 quectel EC800M
- (仅在中国测试,可能在欧盟有效)GPS,使用 quectel EC800M
- 扩展接口:
- USB Type-A接口(可接USB外设)
- 操作系统:tinyDebian OS,原生Debian 12,具有丰富的CAN总线开发环境及工具,支持远程访问及调试
配置WiFi并注册设备
- 在浏览器输入www.usb7.cn,并微信登录。
- 将开发板通过USB数据线连接到 macOS、Windows 或 Linux 计算机。
- 大约 25 秒后,开发板完成启动,红色 LED 灯亮,在计算机浏览器中输入开发板 IP 地址 172.16.10.1 以访问它。
- 按照浏览器中的说明将开发板连接到 WiFi。10 秒后,可以在浏览器看到开发板 WiFi IP 地址,绿色 LED 开始闪烁(表示 WiFi 已连接)。
- 点击右上角 “Go to register” 按钮注册。
- 注册成功后,可以在浏览器看到如下内容:

快速测试
- 在浏览器点击Access按钮登录开发板,用户名:usb7,密码:usb7
sudo apt update
sudo apt install can-utils
# 发送CAN消息到can0接口,CAN ID为123,数据为DE AD BE EF
cansend can0 123#DEADBEEF
# 接收can0接口的所有CAN消息
candump can0
# 将can0接口的所有CAN消息记录到logfile.log
candump can0 -l logfile.log
# 重播logfile.log中的CAN消息到can0接口, 帧时间间隔10ms
canplayer -I logfile.log -g 10
# 从开发板下载文件
sz logfile.log
# 向开发板上传文件
rz
软件开发
- Debian 12运行环境,使用Python和C++做二次开发
- 可以C++和Python混合编程,C++用于解码CAN数据,Python用于将解码后的数据上传到云
- 带有DBC编码和解码的开发demo:https://gitee.com/usb7/can-demo-python
附加信息
- NanoPi Neo Air主板详细介绍:https://wiki.friendlyelec.com/wiki/index.php/NanoPi_NEO_Air/zh
- tinyDebian OS介绍:https://www.usb7.cn/technologies/tinyDebianOS
- 原理图: